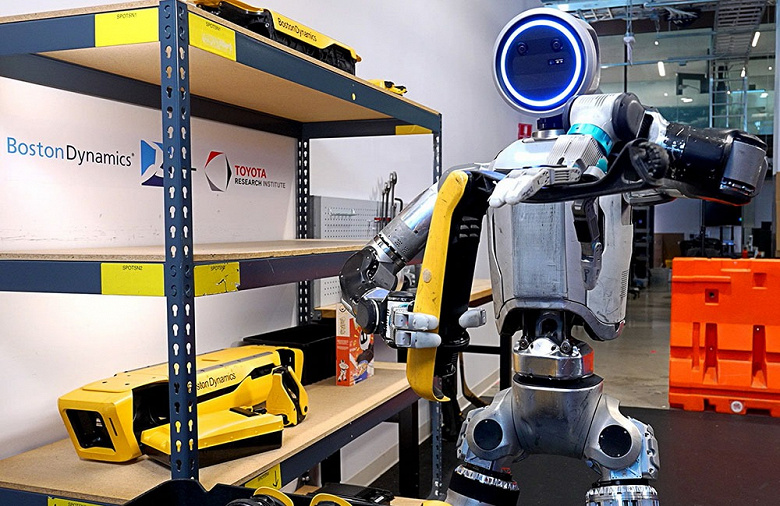
Boston Dynamics представила впечатляющий скачок в разработке человекоподобных роботов, показав на примере робота Atlas, как искусственный интеллект позволяет роботу не только двигаться, но и выполнять длительные и сложные манипуляции с объектами — всё это под контролем обучаемых больших поведенческих моделей (LBMs), созданных совместно с Toyota Research Institute (TRI).
Обучение таких моделей строится на анализе данных как с реального Atlas, так и из компьютерных симуляций, а используемые нейросети способны интерпретировать текстовые команды — теперь роботу достаточно дать простое текстовое задание, и он самостоятельно определяет оптимальную последовательность действий.
Ключевой подход Boston Dynamics — использование единой нейросети, работающей с данными операторов, управляющих Atlas в реальном времени с помощью VR-гарнитур, и синтетических данных из симуляций. Такой симбиоз делает поведение робота гораздо более гибким и универсальным: вместо написания новых программ для каждой задачи Atlas учится выполнять сразу комплекс действий на основе общего алгоритма управления, который реагирует на непредвиденные ситуации и ошибки в процессе работы.


 3.13
3.13