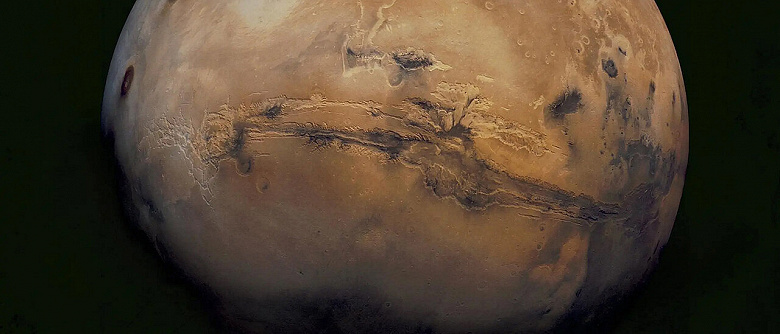
Немецкое космическое агентство (DLR) инициировало проект VaMEx (Valles Marineris Explorer), направленный на исследование крупнейшего известного каньона в солнечной системе — Долины Маринер на Марсе (Valles Marineris). Этот проект включает в себя разработку технологий для роботизированного исследования сложной местности в каньоне. Основная цель VaMEx Valles Marineris — первое исследование ущелий и пещер каньона, а также поиск следов жидкой воды и признаков жизни.
Для достижения этой цели DLR планирует отправить на Марс рой автономных роботов, которые будут работать на поверхности планеты, в её атмосфере и в пещерах, собирая изображения и другие данные. В состав роя входят мобильные роботы, стационарный шлюз на земле, который служит командным центром для связи, а также спутник для обмена данными с Землёй.
Группа профессоров Университета Юлиуса-Максимилиана (JMU) в Вюрцбурге участвует в разработке концепции связи для роя роботов под названием VaMEx3-MarsSymphony. Целью этого подпроекта является создание связи между отдельными элементами роя роботов. Руководитель проекта профессор Хакан Каял отметил, что концепция связи включает в себя ретрансляционные станции, которые передают изображения и данные по цепочке от робота в пещере к шлюзу на поверхности планеты.
Рой также включает в себя так называемые авторотационные тела, которые сбрасываются с воздуха и собирают данные, плавно планируя к поверхности. Последнее достигается благодаря их особой конструкции: удлинённые корпуса, сконструированные наподобие семян клёна. Они имеют крыло и вращаются вокруг собственной оси, что позволяет плавно опускаться вниз. Их траекторию полёта можно контролировать, так что их можно распределить по большей площади, а затем использовать в качестве сенсорных, ретрансляторных и навигационных сетей.


 3.12
3.12